|
Ardalan Aryashad I’m a third-year AME Ph.D. student at USC, advised by Prof. Yan Jin. I have recently started an M.S. in Computer Science. At the Impact Lab, I am currently working on vision-language-action (VLA) models and their applications in robotic task planning and manipulation, and agentic AI approaches for MBSE modeler tasks. |

|
Publications |
|
VLAG: Graph-Based Planning for Vision-Language-Action Models
IDETC/CIE 2025 Modular graph-based planner for long-horizon manipulation with dedicated vision, language, and action modules. |

|
Fog Removal Benchmark
WACV Workshop Benchmarking defogging methods by downstream task performance on synthetic and real datasets. |
Selected Projects |

|
SEMAA: AI Agent Assistant for MBSE
USC IMPACT Laboratory AI agent assistant for MBSE workflows, featuring a context-aware chat interface, diagram import/export, and a web-based plugin to speed up modeling tasks. |

|
USC Racing: Suspension and Data Acquisition
USC Racing Team Combined suspension and telemetry projects focused on quarter-car modeling, genetic algorithm tuning, and a data pipeline with dashboards for performance analysis. |
|
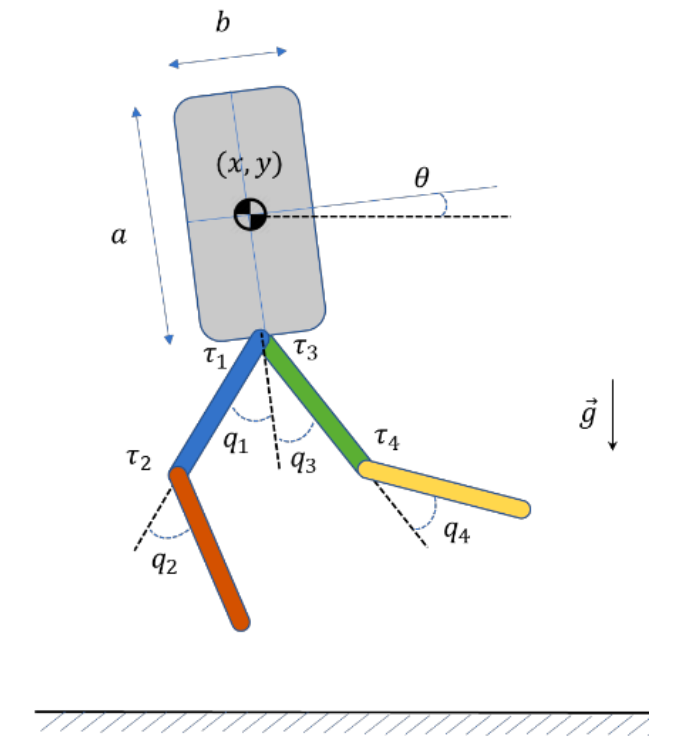
A Walking Biped Robot
AME 556: Robotics Fall, 2024 A 2D biped robot model using MATLAB Simscape with MPC control for stable locomotion, including walking forward, backward, and stair climbing capabilities. |

|
Automotive Predictive Maintenance Application
AME 505: Engineering Information Modeling Fall, 2023 A machine learning application that uses real car sensor data to predict engine problems. Features data preprocessing, multiple ML models, and a mobile-friendly dashboard built with Flet. |
|
Feel free to use this website's source code, design courtesy of Jon Barron. |